| �v�l�̃t���[�`���[�g | |||
| �o���_�Ƃ��āA������ΑʖځB | |||
| ���̔����B���A������~�A��փG�l���M�[�͐l�Ԃ̉p�m�ō��o�� | |||
| �傢�Ɏ^���A�^�����܂��B�����l�Ԃ̉p�m�́A�G�l���M�[���̂��̂��Ǝv���B | |||
| ���������̈�l�Ƃ��āA�G�l���M�[�����l����B�����́A���~�߂Ȃ���Ύ�x��B | |||
| �ł́A���@�͂���̂��B | |||
| ��փG�l���M�[���o����܂� ���C�����[�h�d���Ƃ��Č������p |
�l�Ԃ̉p�m�Ɋ��҂��� | ||
| ���E�����������炯 | �������͂���̂��B��@�Ƃ��Ċ�z�V�O�A �r�����m�A���ł��̗p |
||
| �g���u�������B�R���g���[���s�\�B | �l���ɍl���A�q���g�����ԁB | ||
| �n���A�ŖS�B���̘f�� | �Ƃ肠�����������悤�B�n���Y��H�t�ōޗ��W�߁B | ||
| ����J�n�B�������u�����B�ʐ^����@�B�������܂��B | |||
| ���̔��z��������܂��B�{��ɓ���܂��B | |||
| ��X�l�ނ̑��y�A�A���X�g�e���X�A�j���[�g���A�K�����I�Ȃǂ̑�Ȋw�҂��z���グ�� �����̕��������p�N�b�Ă��܂����B |
|||
| ���L���́A�d�́A���S�́A�����x�A�����̖@���A���ł������A�g���镨�͉��ł��q�B ����Ɍ���l�̐�m�b���v���X����Ȃ�Ƃ��Ȃ�B |
|||
| �ʂ��Ă���Ȏ����\�Ȃ̂��B | |||
| �o����B���͂��̃��[�g��I�т܂����B | �o���Ȃ��B�r�����m�߂���B | ||
| �����̌��ʁA�\���m�M�B�f�[�^�[��萬���B | �v�l��~�A�����̃g���u���҂��B | ||
| �{��Ɉڂ�܂��B | �g���u�������B�n���A�ŖS�B | ||
�����̓��e�B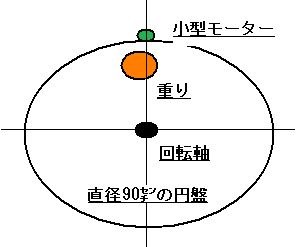 |
2 �܂����a90cm�̉~�Ղ����܂����B�Z���^�[�ɉ�]����ʂ��P�Q�~���̎q�����J���܂����B 3 �~�ՂɃX�e�����X�̃l�W�_��ʂ��A�~�Ղ̗��ʂ����b�V���[�ƃi�b�g�ŋ��͂ɍi�߂āA�~�ՂƉ�]������̉������܂����B 4 ���͉�]���������グ�ĉ~�Ղ����R��]�ł���悤�ɗ��\�ɉ�]���̎x�������܂����B���]�Ԃ̌�ւ��X�^���h�Ŏ����グ��꒓�ւ�����Ԃ�z�����Ă��������B 5 �x���͂��Ȃ���ɍ��܂����B�x�m�R�̗l�Ȍ`�Ő�����L���܂����B�Ȃɂ���A�~�Ղ̊O�������̈�ӏ��ɏd���t���A�o�����X���������Ԃō�����]��������S�Z�Ȃ̂ŁA���Ȃ�̐U���ɑς���\�����K�v�ł��B 6 ��]����ێ�����ӏ��ɂ́A�{�[���x�A�����O��݂��܂����B 7 �d��͐^�J�̉~���ՁA���a5�Z���`���A6����p�ӂ��܂����B�ꖇ200���A�v1.2�s�ɂȂ�܂��B���Ƀ^�b�p�E�F���̔��ɃZ�����g�𗬂�����1.3�s�̕���2�p�ӂ��܂����B 8 �ߋ�̏��^��DC���[�B���d�r�ʼn��{���Ɋߋ�̃��[�^�[�ł��B 9 ����p�̓d�q���ށB ����́A�ꍆ�@�̎ʐ^�ł��B 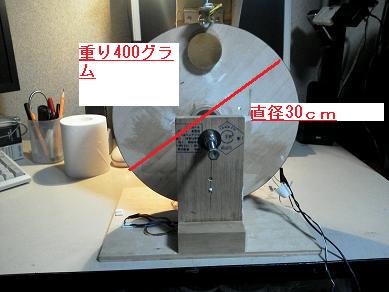 �~�Ղ̒��a��30cm�ł��B��b�����p�ł��B  ��^������2���@�ł��B���a90�����@�d��1.2�s �z��O�A��z�V�O�A�r�����m�A���̍ۉ��ł������o��ł��B�����v���Ȃ���������J�n���܂����B�e�Ɋp�A�����p�~�A����ɂ͑�փG�l���M�[���m�ۂ����i���K�v�ł��B�܂������ł��̎�@���L���ł��邩�A�m�F����Ώ����B�����s�X�g���̏����ł��B�����鎖��z�����ď����͂��܂���B |
||
 |
|||
 |
|||
.JPG) |
|||
 |
|||
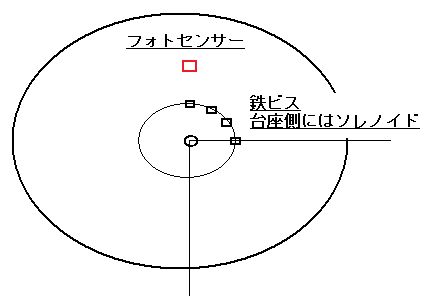
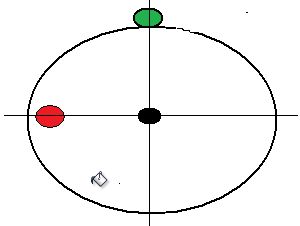
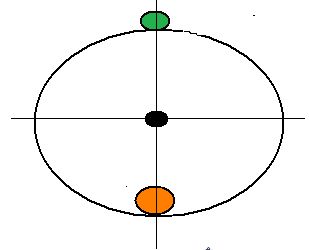
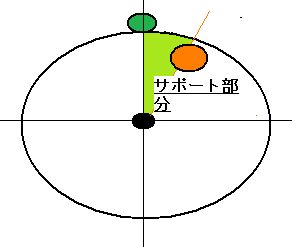
| �\�z�̐����ɓ���܂��B���̎����̓V�X�e�������Ĉ��S���S�A�m���ɑz��d�͂ݏo�����̊m�F�����ł��B���B�ڕW�́A�~�Ղ̋��剻�ł���A�V�X�e�������߂����j�b�g��n���ɖ��݂��鎖��O���ɂ����Ă���܂��B�~�Ղ̒��a��10������20���[�g���ʂɑz�肵�Ă��܂��B�j���[�g�����j�b�R�����������B �܂���}�̐����������܂��B�~�Ղ̊O���̈ꕔ�ɏd���ݒu���܂��B�~�Ղ��ďd����Ō������_�Ɏ����Ă��܂��B���_�Ƃ́A�d�肪���v���A�����v���ɂ��~���ɉ����Ď��R�������Ȃ��A�o�����X�̎�ꂽ��_�ł��B ���ɉ~�Ղ���Œ͂ݔ����v������2,�@3�x�p�x����]�����܂��B�����ĐÂ��Ɏ�𗣂��܂��B�������炪�j���[�g���A�K�����I�̐��E�ł��B�p�����x���N�����ĉ~�Ղ͉�]���n�߂܂��B���L���́A�d�́A���S�́A�������[�����g���ł��L��ł��B�����čʼn��_�ɒB�������_�ʼn�]�G�l���M�[�͍ő�ɂȂ�A���̏u�Ԃɂ́A��]�^���G�l���M�[�����X�Ɏ����Ȃ���d��͏㏸���܂��B������360�x������Ȃ���O�ʼn�]�G�l���M�[���g���ʂ����A�ʒu�G�l���M�[�݂̂ɂȂ�A�~�Ղ͒�~���܂��B���̏u�ԁA���v�����ɉ~�Ղ͉�]���n�߁A�U��q��ԂɈڍs���܂��B�����čŌ�ɂ͏d����ʼn��_�ɂ��ĐU���]�͒�~���܂��B(�x�A�����O�̉��x�㏸�A��C��R�͖������܂�)�B �����܂ł̎��_�ŊO�͂Ƃ��ẴG�l���M�[�́A�قƂ�Ǘ�ł��B���̎肪�d������_����͂������v�����Ɉړ������A�����Ƃ���͑z���ł����A���܂�����Ƃ̊肢�������ɋ͂��ɉ�����l�ɏd��������o������������܂���B����������͔����̐��E�ł��B��𗣂����p�x�A��̗�����A����̎����ł͔����ɈႢ�܂��B����Ĕ����v�Z�͂��̍ەs�v�ł��B����A�ʐ^����B �������猻��l�̐�m�b�̓o��ł��B �ʒu�G�l���M�[�݂̂ƂȂ����d��̒�~�_�A��͂��ň�����܂��B�Ȃ�Ƃ��Ȃ�Ȃ����B��̓T�|�[�^�[�̏o�Ԃł��B �ŏ��ɏ�����ŃX�^�[�g����(�l�Ԃ̎�Ŏ��_����͂��ɂ��炵���_)�ʒu����]�G�l���M�[�������������ł�������������Ώ�����ŃX�^�[�g�������ڂ����ڂ̉�]���ɂ͏������Ȃ���v���X�̉�]�G�l���M�[��ێ����Ă���̂ŁA��]�����x���������ŁA�X�^�[�g�_�̒ʉߎ��̑��x�͈��ڂ����ځA���ڂ��O��ڂƑ����Ă������ł��B�d�C��H�Ō����ƁA�v���X�̃t�B�[�h�o�b�N�������鎖�ł����A�d�C�̏ꍇ�́C���U���N�����Ă��܂��܂����A�����̉�]�G�l���M�[�̏ꍇ�́A�ǂ��Ȃ�낤�B�܂��T�|�[�g��i�͉��������̂��B ���낢��������d�˂܂����B�ŏ��͎��C�����p������@���l���܂����B��]����~�Ղɓ��Ԋu�̊p�x�œS���̃r�X��݂��A����̕��ɂ́A�����~���̈ʒu�ɂ�͂蓙�Ԋu�Ń\���m�C�h��ݒu���܂����B�����A�d���ł��B�����ĉ~�Ղ̉�]�ʒu�����o���邽�߂̃t�H�g�Z���T�[��H��g�ݍ��݂܂����B
�������A����̂��ߓ���������̂����X����B����ɊO�͂͏����ł����Ȃ������b�g�[�ł��B�\���m�C�h�͓d�C��H����ł��B�܊p�j���[�g���̖@�����g���ĘA����]�ݏo�����Ƃ����\�z�ɂ̓}�b�`���Ȃ��B ����ɍl���܂����B ���鎞�A���C�Ȃ���Ɋߋ�̃��[�^�[�������Ă��܂����B�W�����N���������Ă��邤���ɁA���R��ɐG��܂����B���d�r�ʼn��ɁX���^��DC���[�^�[�ł��B�傫���O�����l���ʂ̉�]�g���N���w�ŋ��ނƎ~�܂��Ă��܂������������[�^�[�ł��B ���̏u�ԑM�����̂ł��B����g���邼�B�������e�R�̗͂��B�����ɂ��e�R�̗��_������B���[�^�[�Ɍ�����܂����B��]���̒��a�͂Qmm���x�ł��B��������]���͑������ł��B�������d�r�ɐڑ������݂܂����B�����ȐU���������Ăč�����]�����Ă��܂����B�����Ă�B ���������ꍆ�@�Ŏ����Ă݂邱�Ƃɂ��܂����B��]�~�Ղ̒��a30cm�A�d��400���A�~�Ղ̊O�������ɃS����\��t���܂����B�ڐG��R�𑝂₷���߂ł��B�d������_�v���X���x�̈ʒu�ɂ����čs���w�𗣂��܂����B���R�����A�~�Չ�]�A�T�|�[�g�_�炵���ʒu�ɏd�肪�������A�^�C�~���O���v���ď��^���[�^�[�̉�]�����������Ă܂����B ���ʂ̓Y�o�������ł��B�������[�����g���������~�Ղ́A����̉�]�͂Ə��^���[�^�[�̓������ւ̉�]�g���N����Đ����悭���葱���܂����B���X�ڐG���ƁA����ł��~�Ղ͏��X�ɉ�]�������炵�Ȃ������葱���܂����B��]�������������_�ōēx�ڐG�A�Ăщ�]���𑝂��܂����B ���͑�^���ł��B�~�Ղ̒��a90�����A�d��2.6�s�A���^���[�^�[�͏��^�̎����@�Ŏg�p�����������̂܂ܗ��p���܂����B������]���ɃS���ǂ��͂ߍ��ݒ��a�Xmm�ɉ��H���܂����B���a�̔䗦��100��1�ɂ����̂ł��B���̔䗦�ɂ�����́A������^�~�Ղ��P����100��]�����Ƃ��āA���^���[�^�[��10000��]�ȏ゠��ΑΉ��ł��܂��B���[�^�[������������T�|�[�g���Ԃ̂��Ƃł����A�ꍆ�@�̂Ƃ��́A�^�C�~���O���v���Ď�ʼn������ĂăT�|�[�g���܂������A�Q���@�̏ꍇ�́A�d�q��H��g�ݍ���ŃT�|�[�g�̐����Ƃ�S�Z�ł������A�悭�悭�l�����炻�̕K�v���͂���܂���B�Ƃ����d�C���͓d�q��H�ŕ������R���g���[�����悤�ƍl���܂����A�����͕������ɓO���ĊO�͂͋ɗ͍ŏ����x�ɗ}����B�T�|�[�g���Ԃ̈ʒu���o�A���[�^�[ON OFF�@�\���m�C�h�ł̃��[�^�[�̎����グ����A������S���p�~���܂����B �T�|�[�g�̐��͏펞���^���[�^�[�Ɖ�]�~�Ղ𖧒������邱�ƂŐ������܂��B���̍ۂ̌�����́A�M�A�[�Ȃǖ����ł��B���^���[�^�[�̎��d�ʼn�]�����^�~�Ղ̊O���̃S���ʂ̏�𑖂炷���Ƃł��B�������́A�v�Z����������܂����A���̍ۓd�C���̓t�@�W�[�ł��B�v�Z���������ł��B ���ʂ��L���܂��B������]�������܂����B1���Ԃ̉�]��120�B2.6�s�̏d��̓u�����u�����Ɖ������Ăĉ�]���Ă܂��B�����Ɋ������[�����g�ݏo���܂����B�����ŗ͊w�Ŏg���������[�����g�̒�`���ȒP�ɏq�ׂĂ����܂��B �������[�����g�Ƃ́A�d�ʂ̑傫�����̂������͑�ςł����A���ɓ����o�����������đ��x���オ��Ǝ~�߂鎖�͍���ł��B��]�^���ɓ��Ă͂߂܂��ƁA�������[�����g���傫���ƁA��]�����n�߂ɂ����A��]���i�ނƎ~�܂�ɂ����ƌ������Ƃł��B |
|||
| ����������Ȃ玿�� (���̏ꍇ�͏d��̏d�ʂƍl���Ă������ł��傤�B) �~�Ղ̔��a�A��]���A���������Ă���̂ŁA��^�~�Ղ̉�]���̃g���N�v�Z�͊ȒP�ɂł���ł��傤�B���������͓d�C���A��]���Ƀ^�R��������Ŋ��Ԃ��g���Đ��̓������y�b�g�{�g�������{�����グ�邩�A�����Ă݂܂����B4�s���̖{���̃y�b�g�{�g�����Ȃ������グ�܂����B�Ō�̓^�R�����d�݂Ő�܂����B |
|||
| �����ŗ͂̌o�܂����܂��B | |||
���L���́A�d�́A���S�́A��]���x �������[�����g�A���ł��̗p�B |
|||
| |
|||
| �A����]�𑱂���ɂ͊O�͂̃T�|�[�g�K�v | |||
| |
|||
| ���^���[�^�[�̗p�B�e�R�̘_�� | |||
| |
|||
| ���ʓI�ɏ��^���[�^�[�̉�]�G�l���M�[�� ��^�~�Ղ̉�]���̃g���N�ɕϊ� |
|||
| ���悢��{��ɓ���܂��B���V�X�e�������剻���܂��B����10������20���̉~�Ղ�z�肵�Ă��܂��B��^���͕����̌v�Z���瓱���o�����K�{�����ł��B�Ō�ɐ������܂��B���u�����j�b�g�����Ēn���ɖ��݂��܂��B��������Đݒu���܂��B���ɓ������a�̃u���[�h�@(�v���y��)�@�����������͔��d�V�X�e���Ƃ̔�r�����Ă݂܂��B | |||
| ���͔��d�Ƃ̔�r | |||
| |
|||
| ���V�X�e���̃����b�g | ���V�X�e���̃f�����b�g | ||
| |
|||
 |
���̎ʐ^�͉��l��
��ϗ��ԁu�R�X���N���b�N21�v�ł��B
|
||
| |
|||
| �Ō�ɉ��̎��� (�d��) �Ɣ��a��傫������A�@�����ȒP�ɐ������܂��B���Z�̕������x�ŗ����ł��܂��B | |||
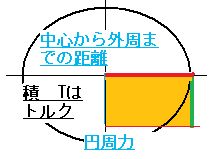 |
���S�_���ӂɐ�����g���N�́A���S����O���܂ł̋��� (�Ԑ�) �̒����ƁA�O�����Ɋ|���鎿�ʁA���̏ꍇ�́A�d�ʂƒu�������Č��\�ł��B(��F��)�̐ςł���킵�܂��B�ʐς������قǃg���N�͑傫���Ȃ�v�Z�ł��B���̎��ɂȂ�܂ł̉ߒ��͕����w�̍u�`�ł͂Ȃ��̂ŏȂ��܂��B �������[�����g���傫���Ȃ鎖�́A��]���n�߂ɂ������A��]�����n�߂�Ǝ~�܂�ɂ����A�ł����B�������[�����g��傫��������@�́A ��͂蔼�a��傫�����邱�Ƃł����B �ȉ����ŊȒP�ɐ������܂��B |
||
| �p�^���� L�@�A�p���x w�A�������[�����g I ���̎O�̊Ԃɂ͉^���̒�`���Ɏ����@L=Iw �ŕ\���܂��B ��]�^���̏ꍇ�A���x�͊p���x*���a�ŕ\���܂��B�^���ʂ͎���*���x�ŕ\���A�p�^���ʂ͔��a*�^���ʂŕ\���܂��B ���̑O�ɁA�������܂��B�����̐��E�ł́A�^���ʂ��傫���A�^���ʂ��������Ƃ悭�����܂��B���d�����̂���葁���������������^���ʂ��傫���ƌ����܂��B���̔��ɂ�菬�������̂����Ԃ��|���ē��������ꍇ�^���ʂ͏������ƌ����A����Ɏ��Ԃ��|���������A�^�������������ƕ\�����܂��B��������ɒ����ƁA �@�@�@�@�@�@�@�@�@�@p = m v�@�@�@�@�ƂȂ�܂��Bp�͉^���ʁAm�͏d���Av�͑��x�ł��B ���� p�@�̉^���Ɋ|���������ԁ@t�@�̊T�O���v���X����ƁA �@ �@�@�@�@�@�@�@�@�@�@p = F t�@�@�@�@�@�ƂȂ�܂��BF�͕��̂������Ƃ���͂ł��B���Ȃ킿�A �@�@�@�@�@�@�@�@�@�@m v = F t �@�@�@����Ɂ@F =m v /t�@�@v / t�@�͉����x�ł�����Ak�@�Ƃ��ā@F =m k �ƂȂ�܂��B �ŏ��ɖ߂��āA�@���x=�p���x*���a�@�@�^����=����*�������x*���a�@�@�p�^����=���a*����*�p���x*���a ��������ƁA����*�p���x*���a�̓�� L = I w ���� I=L / w�@�@�@L/w�͔��a*����*�p���x+���a�@/�@�p���x�ƂȂ�A��������Ɣ��a�̓��*���ʂƂȂ�܂��B �������[�����g�@I �͔��a��傫���A���ʂ͏d������ƁA���傷�邱�Ƃ�������܂��B ���̎����@�̔��a�͖�50�����A����2.6kg�@�Ȃ̂ŁA����a5m�A�d��\�{��30kg�ʂɂ���A�P���v�Z�ł�10�̓�悩����10�ƂȂ�1000�{�ƂȂ�܂��B �n���ōŏ��̌���G�l���M�[���g���āA��̓j���[�g���A�K�����I�̗͂����B���ꂪ���̖ڕW�Ƃ���Ƃ���ł��B�����p�~�ɏ����ł��߂Â���K���ł��B ���]�@�q���@�@�@�@H26�N5��22���@�@�@�ق��p�m�Ɋ肢�����߂āB�@�@ http://washimo-web.jp/Technology/Statics/StaticsIndex.htm�@ �������Ă��炢�܂����B�L��������܂��B �Ō��  120rpm���Ă���2�������@�ł��B |
|||
| * | |||